Rethink Digital Harness Design
27. OCT 2021
In this blog article I would like to present you how we boosted our simulation process in terms of speed and optimization. We were up to now struggling with the amount of iterations until we found out the best placement of our harnesses. The core of this new approach is called Design Space Exploration and uses an optimization algorithm to iteratively approach the optimal harness design in a pre-defined space. With this new approach we have speed-up our processes to finish within 24 hours and give us more time to align with customers on data quality.
Why do we need to rethink digital design?
The use of a simulation toolchain is already part of daily work processes of me and my colleagues. It supports a wide field of activities from electrical dimensioning of the wires in the harnesses to the design of mechanical components and their structure, right placement & cooling of electronics PCB, down to the design of our injection tooling to ensure the right molding processes.
In addition, we have started the dynamical simulation of specific critical harness routing e.g. doors & trunk opening, connection of driveline & axles etc. The goal here is to ensure the right placement and properties e.g. length of the harnesses to guarantee the right performance and avoid any risk of clinch, break etc.
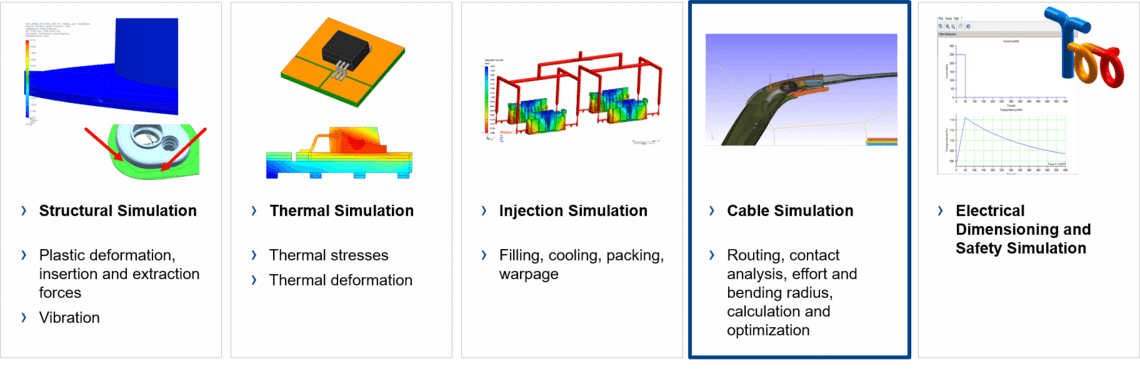
Simulation categories available at LEONI
The cable simulation is based on an exact understanding of the different cables to simulate. Therefore, LEONI has invested in a characterization machine called Mesomics that extracts all cable parameters based on laser measurement and with high accuracy e.g. bending properties.
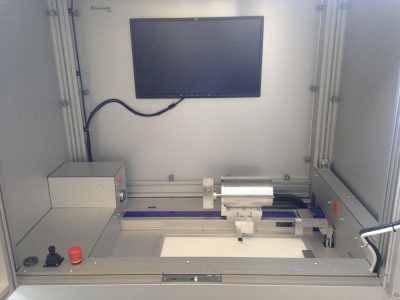
Mesomics measurement machine developed by Fraunhofer institut.
These parameters are integrated in our database to customize the cable simulation models that will be used in our projects.
In a project engineers will use the 3D mechanical design and the environment to simulate the tensions and bending radius and route the harnesses based on guidelines & own experience. Resulting from the simulation a fatigue index is extracted and presented like a traffic light to focus on risky situations. Changes in the fixation points, length etc. will be evaluated iteratively until an adequate routing is achieved.
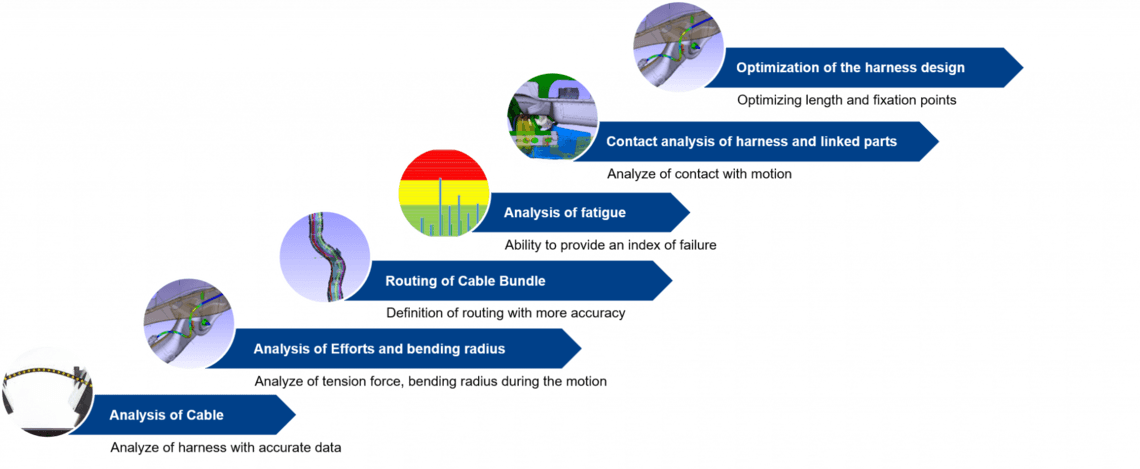
Cable simulation possibilities with LEONI knowledge.
This manual iterative process is currently limited by 2 factors: the experience of the engineer to find the adequate solution in the minimum amount of iterations, and the time needed for manual preparation & evaluation. These 2 limitations lead to a procedure time of around one week, depending on the use-case complexity. This long time is not acceptable anymore in our opinion in an early phase where changes in the design occur with high flexibility and in production phase when sudden events must be solved as fast as possible.
Improvement based on Design Space Exploration
We have investigated since nearly 2 years how to speed up this procedure and come to nearly 24h. Our goal was to give engineers the possibility to align on the use-case, integrate the input data and degrees of freedom to let the toolchain work on automated way until it provides them with the optimal results that can be aligned on the next working day.
The iterative process has been adapted to a close-loop process with a design optimization proposal that automatically adapt the design proposal within the degrees of freedom as long as the bending issue is not solved.
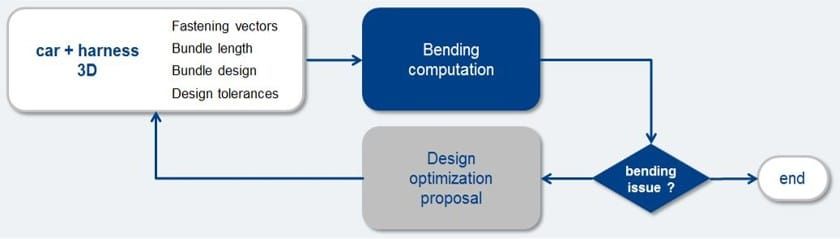
New adaption of the iterative process: a close-loop process enables adaptions of the design proposal until the bending issue is solved.
The idea behind this is to start with the basic data that we receive from the customer which are 3D CAD data. On these data we will have the harness fixation initial position and the surrounding parts, all the starting data needed for basic cable simulation. After it we will just start a simulation to check the different constrains such as bending radius and tension force in addition to distance between the cable and surrounding parts. The results will be stored in a table before questioning if those results linked to a design are the optimal solution or not. This is the initial loop before going back to the 3D data and changing some input parameter to check if the new design is improving the results. After several loops, the output will be all the different results stored in the table and at the end the optimal configuration of the design.
According to the following picture, the project is defined by some input data which are geometrical parameters (N). With those input parameters, the optimization software will start with a Design of Experiment to have a rough estimation of the different output parameters according to input parameter large variation. These configurations will be linked with the simulation model to check the value of the output parameters link. With those first point, we have a kind of 3D map of the input/output parameter equation. This is where a surrogate model comes in question. This is like a theoretical link between input and output parameter which will give a fast answer of the output data with new input data.
This surrogate model will give some results which are put back in the simulation software to check the accuracy and confirm or not that there are better than the older results. At the end of the algorithm we have the best value of output data according to the input parameter. We have also the 3D position of the optimal fixation point.

Technical process of the project with iterations.
To understand this optimization more in detail we can have a look at the two following pictures of a 3D example:
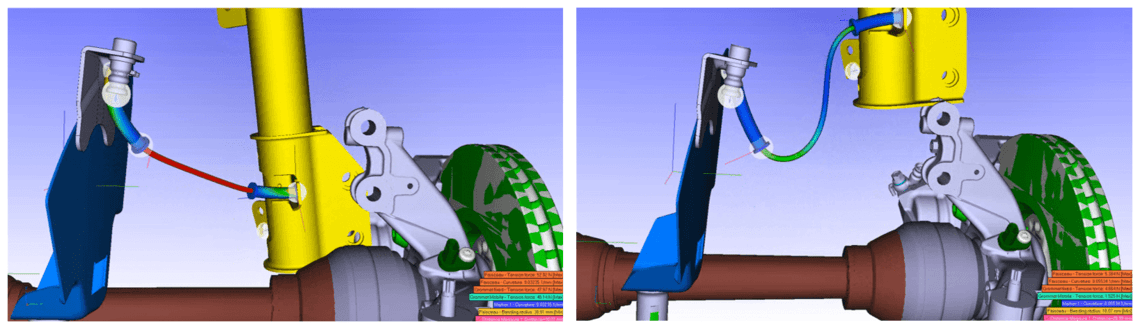
Comparison between the first design without any optimization on the left and the design after using the simulation process for optimization of the design on the right.
On the left case, we have the first design from the customer without any optimization. On the right, we used the optimization process to change the cable length, the fixation position and orientation to avoid tension constrains on the cable, delete the contact between the harness and the surrounding parts causing friction and damaging the cable and finally increase the bending radius of the dynamic loop to improve the durability.
Further prospects and conclusion
With the help of Design Space Exploration, our newly introduced approach to simulation, we managed to enhance the efficiency and accuracy of our simulation processes. The implementation of an optimization algorithm to iteratively approach the optimal harness design in a pre-defined space enables us to solve optimization challenges within 24 hours. Therefore, instead of wasting time on a huge amount of manual iterations, we can now spend the time gained to dedicate ourselves more to our customers.


Do you have a question?
We’ll be glad to help. We look forward to hearing from you.
Phone +49 9321 304-0
E-mail blog@leoni.com




